Research Outline
I am interested in mobile manipulation, new robot designs, and control algorithms to make it work.
At present, I am working on two different aspects:
1) Developing planning and control strategies for mobile manipulation tasks for a home-like environment - the candidate may get an opportunity to work on advanced mobile manipulator hardware.
2) Developing new mechanisms for different robotics applications; some interesting works are going on this line right now (Novel mechanisms for Drones, Robotic Hands, Rehabilitation devices, etc.), and the main objective here is how to increase the versatility with a simplistic design.
* Interested students can contact me at nagamanikandan.g@iiitdm.ac.in
Novel mechanisms for Drones
We develop novel mechanisms for various drone applications. The underactuated gripper can grasp objects with active actuation and land on any support structure by perching. While perching, the fingers passively conform to the substrate’s geometry. The underactuated design can also keep the drone levelled even on the sloped landing terrains.
Publications:
-
Aditya S, Zahiruddin M, Poorna Sasank S, Ankur B, Nagamanikandan G. "WireFlie: A Novel Obstacle-Overcoming Mechanism for Autonomous Transmission Line Inspection Drones." IEEE Robotics and Automation Letters + IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
-
Deep P, Nagamanikandan G, Manas Reddy, Harikumar K. "GPALM - Multifunctional Underactuated Mechanism with Grasping, Perching, and Adaptive Landing Skills for Drone Applications" Transactions of ASME. Journal of Mechanisms and Robotics, Apr 2025.
Robot hand capable of grasping and throwing manipulation
Throwing manipulation is known for significantly fast rearrangement, sorting tasks, and placing objects outside the limited workspace with less effort. We present a standalone mechanism of a single actuated driven throwing gripper with mechanically coupled rigid links and an elastic gripping surface. This provides the function of grasping, placing, and throwing objects.
Publications:
-
Nagamanikandan Govindan, Bharadhwaj Ramachandran, Pasala Haasith Venkata Sai, K Madhava Krishna. "A Novel Hybrid Gripper Capable of Grasping and Throwing Manipulation," in IEEE/ASME Transactions on Mechatronics, doi: 10.1109/TMECH.2023.3264287
-
Pasala Haasith V S, Nagamanikandan Govindan, and Samarth Brahmbhatt. "Identification and Learning-Based Control of an End-Effector for Targeted Throwing." IEEE Robotics and Automation Letters, Aug 2024. 10.1109/LRA.2024.3462250 IF: 4.6
Mobile manipulation
Performing mobile manipulation tasks in a home-like environment require a synergy of navigation, manipulation, and interaction with the environment. In line with it, students at RRC are developing a proof-of-concept of a mobile manipulation system to demonstrate tasks involving human commands, typically picking and placing an object in a partially unstructured environment. Other than typical pick-and-place tasks, students are also working on various research threads (like model-based manipulation) to make the real physical robots perform fine manipulation tasks such as pushing, sliding, striking, throwing, etc.

Design, development, and control strategies for a novel underactuated multimodal robot - GraspMan
The novelty of the proposed robot lies in the design of the two sub-modules:
1) a multipurpose grasper having the capabilities of shape conformation, within-hand manipulation, and a built-in compact mechanism to vary the forces at the contact surface
2) an articulated floating base serial chain connected to the graspers to achieve different grasping and manipulation (prehensile and non-prehensile manipulation) and locomotion modes.
Publications:
-
"GraspMan: A Novel Robotic Platform with Grasping, Manipulation, and Multimodal Locomotion Capability." In 2018 IEEE International Conference on Robotics and Automation (ICRA), pp. 7354-7359. IEEE, 2018. DOI: 10.1109/ICRA.2018.8462970
-
Nagamanikandan Govindan, Shashank Ramesh, and Asokan Thondiyath. "A new gripper that acts as an active and passive joint to facilitate prehensile grasping and locomotion. Accepted for IROS 2022
Design and Analysis of a Multimodal Grasper
A design, analysis, and testing of a novel multimodal grasper having the capabilities of shape conformation, within-hand manipulation, and a built-in compact mechanism to vary the forces at the contact surface have been presented.
The proposed grasper has two important qualities: versatility and less complexity. The former refers to the ability to grasp a range of objects having different geometrical shapes, sizes, and payloads, and perform in-hand manipulations such as rolling and sliding, and the latter refers to the uncomplicated design, and ease of planning and control strategies.
Increasing the number of functions performed by the grasper to adapt to a variety of tasks in structured and unstructured environments without increasing the mechanical complexity is the main interest of this research.
Simple and scalable structure, compactness, low cost, and simple control scheme are the main features of the proposed design.
Detailed kinematic and static analyses are presented to show the capability of the grasper to adjust and estimate the contact forces without using a force sensor.
Experiments are conducted on the fabricated prototype to validate the different modes of operation and to evaluate the advantages of the proposed concept.
Keywords: Multipurpose grasper, shape conformance, within-hand manipulation, contact force modulation.
Publications:
-
Design and Analysis of a Multimodal Grasper Having Shape Conformity and Within-Hand Manipulation With Adjustable Contact Forces." ASME. Journal of Mechanisms and Robotics. October 2019; 11(5): 051012. DOI: https://doi.org/10.1115/1.4044163
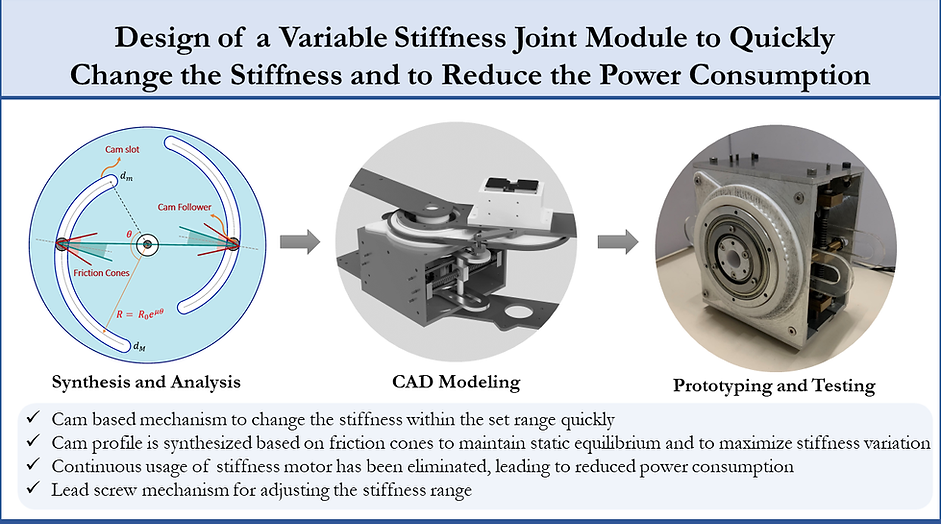
Variable Stiffness Joint Module
Publications:
Nagamanikandan Govindan, Shashank Ramesh, and Asokan Thondiyath. "Design of a Variable Stiffness Joint Module to Quickly Change the Stiffness and to Reduce the Power Consumption." IEEE Access, vol. 8, pp. 138318-138330, July 2020. DOI:10.1109/ACCESS.2020.3012031.